
Mechatronics Engineering graduate from the University of Newcastle, completed in 2025, with experience in embedded firmware, PCB design, and mechanical prototyping. Between University and personal projects I have experience across the full product development cycle, from initial concept and simulation through to manufactured hardware. I am particularly interested in roles where this broad skill set can be applied.
My passion for building and experimenting comes from a strong curiosity about how machines work. I am often drawn to projects that push me into a new skill or area of mechatronics, using each one as an opportunity to learn something unfamiliar. This hands on approach has helped me develop practical skills, whether that means picking up new tools, improving designs, or gaining a deeper understanding of real world engineering challenges.
Workshop & Projects Gallery




Hardware & CAD
CAD Software
Over 10 years of experience in parametric modelling across multiple platforms. Fusion 360 is my primary tool, with additional experience in Inventor, Onshape, and Creo through university coursework. I approach all modelling with fabrication in mind, considering tolerances, print orientation, and assembly constraints from the outset.
Fabrication
Extensive hands-on experience with FDM 3D printing and laser cutting for rapid prototyping. I have a strong understanding of the practical constraints of each process, including layer orientation, wall thickness, clearance fits, and material behaviour, and apply this knowledge to produce reliable, functional parts on the first iteration.
Electronics
PCB Design
Designed and assembled PCBs for a range of university and personal projects, covering schematic capture, board layout, component selection, fabrication, and hand assembly.
Microcontrollers
Experience working with a wide range of embedded platforms. STM32 was used extensively throughout university for implementing control loops and developing custom firmware. The Raspberry Pi RP2040 and Arduino platforms are commonly used in my personal projects for rapid prototyping. ESP32 is used for wireless and more computationally demanding applications.
Software
Python
Applied Python for computer vision and machine learning projects, including a shape recognition neural network, face and character recognition pipelines, and a reinforcement learning agent. NumPy and Pandas used for data processing tasks.
C / C++
Used Python for computer vision and machine learning projects, including a shape recognition neural network, face and character recognition pipelines, and a reinforcement learning agent. NumPy and Pandas are used for data processing and analysis.
Projects
Balancing Robot
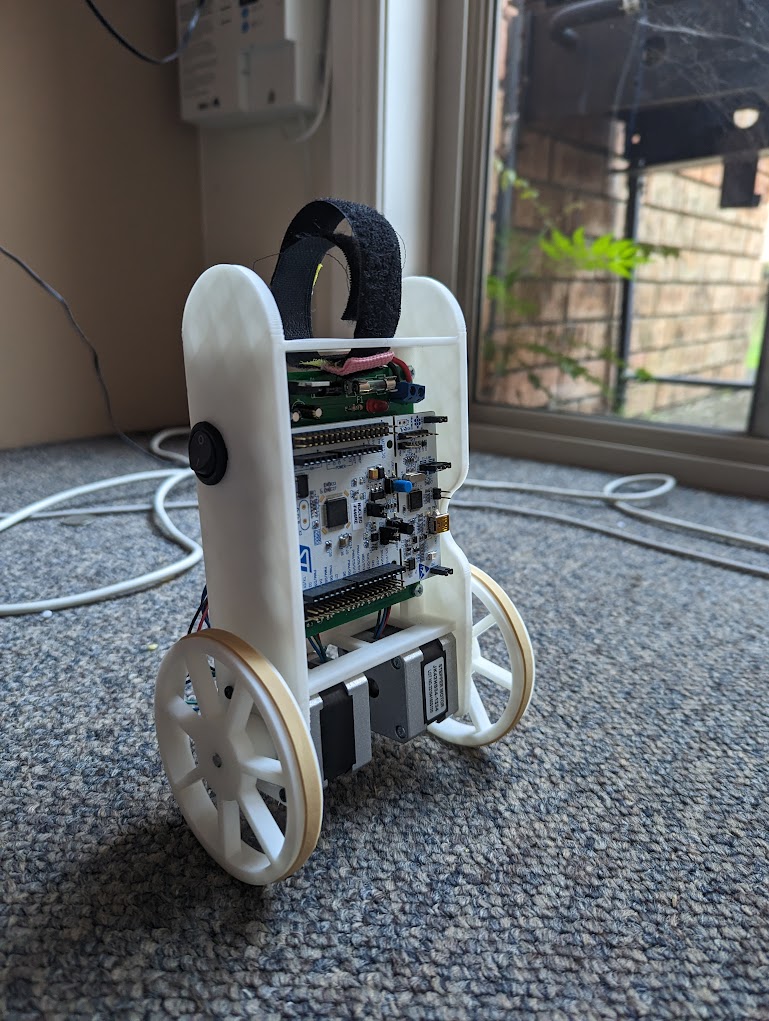
Developed a two-wheeled self-balancing robot as a solo university project, capable of driving and steering while maintaining stability. Designed the PCB using Autodesk Eagle, including component selection, schematic capture, and board layout, and implemented all firmware in C++. The control system used IMU-based angle estimation with a Kalman filter and an LQR controller. The project provided strong experience in system identification, control design, and embedded development.
Rocket Roll Controlled Camera System
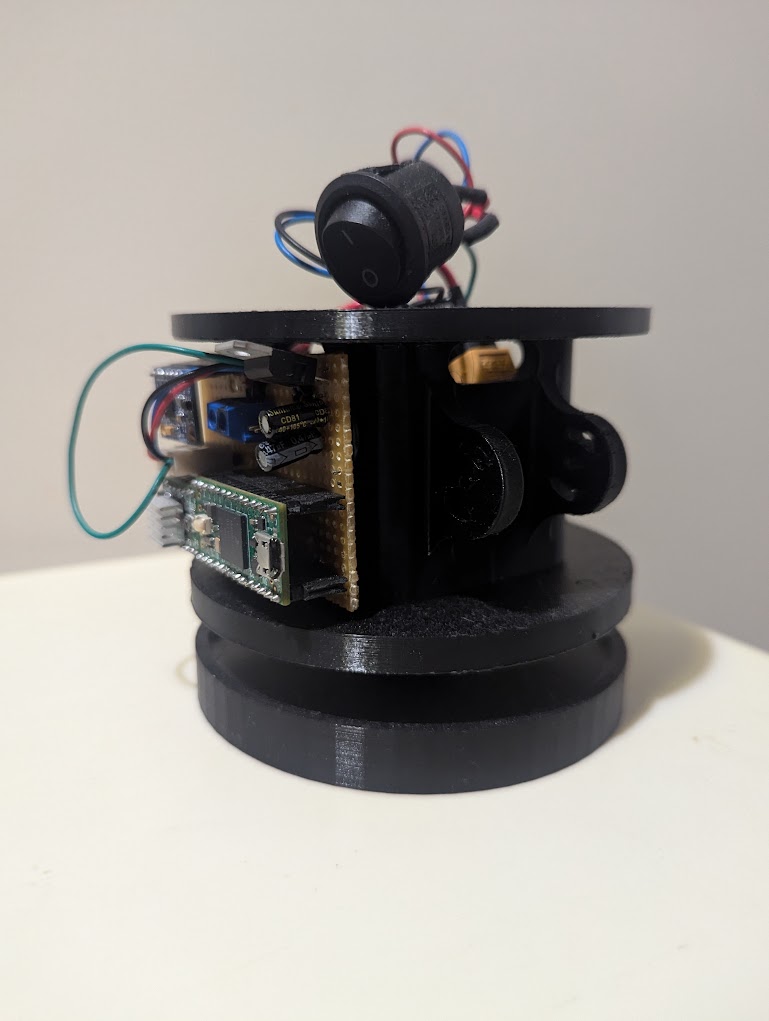
Final year project involving the development of an active roll-stabilised camera system for a high-powered rocket, designed to maintain level horizon footage during flight. Completed as a solo project, covering mechanical design in Fusion 360 and embedded firmware for IMU-based sensor fusion and servo control. The project developed skills in CAD, electronics, and sensor filtering, all within strict size and mass constraints.
Fully 3D Printed Rocket
Designed a small rocket for 18 mm motors that can be fully 3D printed in under two hours. The project focused on designing for additive manufacturing, with careful consideration of tolerances, layer orientation, and structural integrity to ensure reliable flight performance. This work strengthened my CAD skills and understanding of designing parts specifically for FDM processes.

Filament Storage
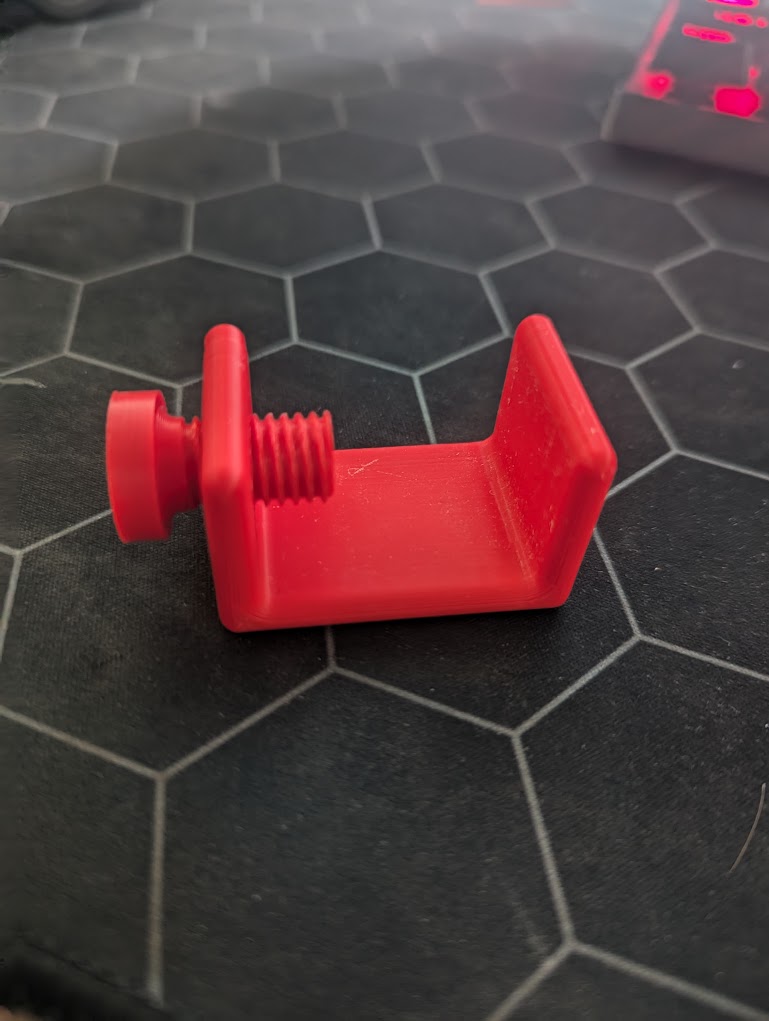
Modular filament spool rack built from aluminium extrusion with custom 3D printed brackets. Designed to minimise material usage and print time while maintaining rigidity and allowing easy reconfiguration, a practical exercise in design for assembly and manufacturing constraints.
Currently Building
Autonomous Drone
Developing an autonomous quadcopter using a simulation-first approach. The custom physics simulator models quadcopter dynamics with a simulated IMU, and currently implements an MPC controller capable of flying to a target altitude and maintaining a stable hover. The goal is to validate the full navigation and control stack in simulation before transitioning to real hardware.

Smart Bar Coaster
A connected coaster using a precision load cell to measure liquid weight in real time, with RGB LED feedback to guide accurate pours. The hardware is functional. Weight measurement and LED control are implemented and working. Companion app development is currently underway.
Contact
Based in Newcastle, NSW — Open to opportunities